INTRODUCCIÓN
En la anterior newsletter de la Unidad de Ingeniería y Evaluación Motora (UIEM) de fecha 13/05/2022 se presentó un software que estamos desarrollando para el análisis de la cinemática de pequeños animales llamada KineRAT. Durante la prueba se registran unos vídeos de la rata pasando por un pasillo. Estos vídeos se tratan con otro software llamado Kinovea (Figura 1), que suministra los datos de los marcadores, de los ángulos de las articulaciones y de los eventos que definen los ciclos de marcha. Posteriormente, el software KineRAT divide los datos de cada pasada en ciclos y aporta una serie de estadísticos y de gráficas que el investigador aplicará en sus estudios. Las principales características de la herramienta KineRAT son las siguientes:
- Herramienta cuantitativa y objetiva de evaluación cinemática de la locomoción de animales de experimentación.
- Documenta el patrón del animal con un solo click de ratón.
- A partir de los datos de ángulos articulares y eventos analiza la locomoción del animal.
Independiente de cualquier tecnología, equipo o software de adquisición cinemática.
Programado en lenguaje de código abierto. - Análisis de la locomoción basado tanto en el ciclo de marcha, como en el recorrido del animal.
Análisis bilateral, por lo que aporta variables de paso y de coordinación entre miembros ipsi y contralateral. - Actualmente están implementados los miembros traseros: ángulos de la cadera, la rodilla y el tobillo, y los parámetros espaciotemporales y de coordinación entre miembros traseros y delanteros y entre traseros.
- El software se puede escalar a los miembros delanteros, a otras variables o a otras especies animales.
La herramienta ha sido probada en dos proyectos de investigación liderados por la investigadora Vinnitsa Buzoianu y el doctor Jörg Mey, lo que ha permitido su depuración y puesta a punto. Para cubrir las necesidades del estudio de Jörg se han diseñado diversas variables para evaluar la coordinación entre miembros delanteros y traseros y entre miembros traseros.
Por otro lado, para desarrollar todo el protocolo de la prueba cinemática de evaluación de la locomoción se utilizaron 7 ratas sin ninguna intervención ni lesión. Los datos de 5 de estas 7 ratas son aprovechables y van a ser los primeros para crear una base de datos de normalidad de ratas sin ninguna afectación ni intervención.
En esta newsletter se presentan a modo de ejemplo los resultados de una prueba cinemática de locomoción de una rata analizada con el software KineRAT. Estos resultados son de una rata macho perteneciente al Laboratorio de Regeneración Neuronal, de 324 gr de peso y 12 semanas de edad. La rata fue lesionada por impacto a nivel de T9 y posteriormente recibió un tratamiento con células mesenquimales. En la quinta semana después de la lesión se le practicó una prueba de análisis cinemático. El día de la prueba esta rata tenía una valoración de 8 en la escala BBB [1]. Los resultados de la prueba cinemática de esta rata se presentan junto con los de una base de datos de 5 ratas sin intervenir, de las cuales 4 son macho y 1 es hembra, de 219 (+/-6) gr de peso y 9,0 (+/-1,1) semanas de edad.
Previamente a la adquisición de los vídeos, la rata ejemplo (igual que las ratas que no han recibido ninguna intervención) se rasuró y con un rotulador de color negro se pintaron marcas en la cresta ilíaca, cadera, rodilla, tobillo, cabeza del 5º metatarsiano y cabeza del 5º metacarpiano, en ambos lados del animal. La rata pasó 6 veces por un pasillo de marcha de 1,5 m, del cual se analizaron 0,47 m de la parte central para eliminar los efectos de aceleración y frenado del animal. De los 6 recorridos se seccionaron 3 para su análisis. Los videos se registraron a 125 Hz.
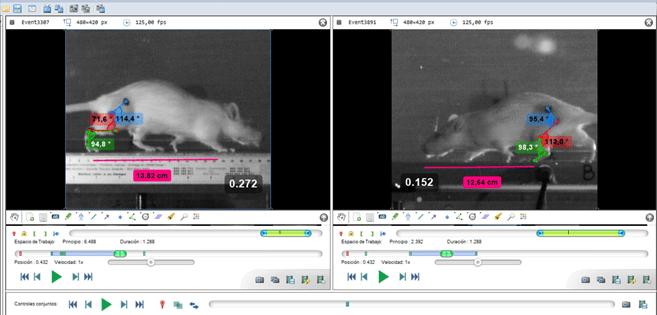
Figura 1. Software Kinovea de análisis cinemático.
La Imagen muestra dos fotogramas durante un recorrido correspondientes al mismo instante de tiempo de los lados derecho (izquierda) e izquierdo (derecha) del animal. Cada fotograma ilustra los ángulos de la cadera (azul), rodilla (rojo) y tobillo (verde), y la longitud (magenta) y duración (blanco) del ciclo.
RESULTADOS
Variables espacio-temporales
En cuanto a las variables espaciotemporales de las extremidades traseras, la rata ejemplo presenta una disminución en la longitud del ciclo, la velocidad, la longitud de paso y el apoyo monopodal, respecto de las ratas sin intervención (Tabla 1). Se observa un aumento en la frecuencia de ciclos, la duración de la fase de soporte derecha, la longitud de paso derecho, la frecuencia de pasos y el apoyo bipodal de la rata ejemplo respecto de las ratas sin intervención. Además aparecen fases del ciclo de locomoción donde no existe ningún contacto de ambos miembros traseros con el suelo, mientras que en el caso de ratas sin intervención, como cabría esperar, este comportamiento no se da.
En cuanto a la coordinación entre miembros traseros y delanteros, la variable ‘Desfase tras-del’ calcula el desfase de los contactos iniciales (CI) del miembro trasero respecto de los CI de los ciclos correspondientes del miembro delantero del mismo lado (Tabla 1). Los datos muestran una mayor dispersión en los desfases en el caso de la rata ejemplo respecto de las ratas sin intervención, lo que sugiere que esta variable podría ser útil para evaluar la coordinación ipsilateral [2]. Las variables de coordinación basadas en el contaje de los CI traseros dentro del ciclo delantero correspondiente (% BBB coord tras-del y % fallos coord tras-del) muestran un mejor comportamiento del lado derecho que el izquierdo [1]. Los CI de un miembro trasero que ocurrieron dentro del ciclo del miembro delantero del mismo lado fueron mayores en el del lado derecho de la rata ejemplo que en su lado izquierdo.
El software KineRAT calcula de manera similar la coordinación entre miembros traseros y delanteros que la coordinación entre los miembros traseros. Por tanto, la variable ‘Desfase iz-dr’ calcula el desfase de los CI del miembro trasero izquierdo respecto de los CI de los ciclos correspondientes del miembro trasero derecho (Tabla 1). Los datos muestran una mayor dispersión en los desfases en el caso de la rata ejemplo respecto de las ratas sin intervención. Las variables de coordinación basadas en el contaje de los CI traseros izquierdos dentro del ciclo trasero derecho correspondiente (% BBB coord iz-dr y % fallos coord iz-dr) muestran un mejor comportamiento del lado derecho que el izquierdo [1]. Los CI del miembro trasero izquierdo que ocurrieron dentro del ciclo del miembro trasero derecho fueron mayores en el caso de las ratas sin intervención que en la rata ejemplo.
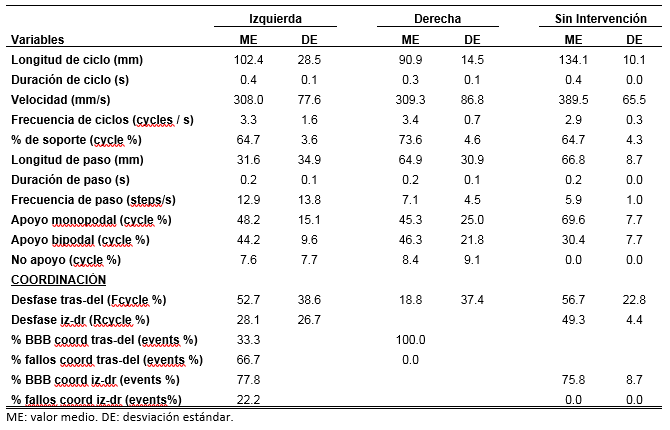
Tabla 1. Datos espaciotemporales y de coordinación de los ciclos analizados
ME: valor medio. DE: desviación estándar.
Ángulos articulares
Respecto al desarrollo articular de los miembros traseros durante la locomoción del animal, para simplificar esta newsletter solo se van a comentar los rangos articulares (rang = max – min), aunque se muestran todas las variables que calcula el KineRAT para documentar su potencial.
No se observa una diferencia reseñable en cuanto al rango de flexoextensión de cadera de la rata normal respecto de las ratas sin intervención (Tabla 2, Figura 2). En cuanto a la rodilla se observa que la rata ejemplo tiene un rango de flexoextensión disminuido en comparación con las ratas sin intervención, mientras que el recorrido de flexoextensión del tobillo de la rata ejemplo es mayor que el de las ratas sin intervención.
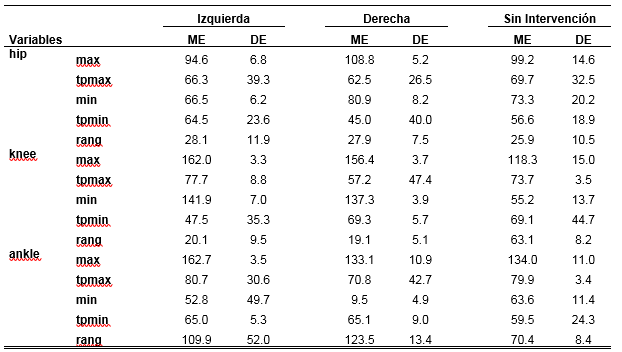
Tabla 2. Estadísticos de los recorridos articulares de los ciclos analizados
max: valor máximo, tpmax: tanto por ciento del ciclo en el que ocurre el valor máximo, min: valor mínimo, tpmin: tanto por ciento de ciclo en el que ocurre el valor mínimo, rang: max – min.
ME: valor medio. DE: desviación estándar.
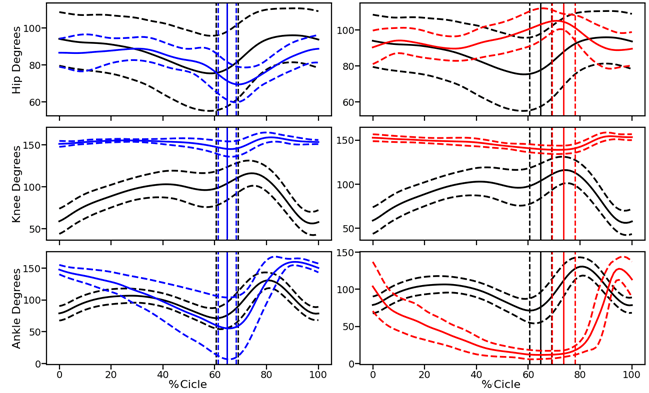
Figura 2. Ángulos articulares correspondientes a los ciclos analizados.
Línea continua: valor medio; línea discontinua: valor medio +/- desviación estándar; línea vertical: despegue de la pata; azul: lado izquierdo rata ejemplo; rojo: lado derecho rata ejemplo; negro: ratas sin intervención; valores ascendentes corresponden a movimientos de flexión.
Para completar de ilustrar los datos que aporta la herramienta KineRAT, el Anexo muestra los ángulos articulares y las barras de apoyo-oscilación de un recorrido de la rata ejemplo por el pasillo de marcha y la gráfica de stick-figure que describe el movimiento de los segmentos de la rata ejemplo durante el mismo recorrido.
ANEXO
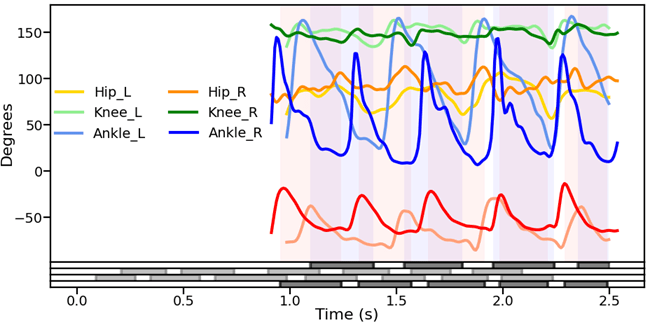
Figura 3. Ángulos articulares de la pasada 2 de la rata ejemplo.
Las barras inferiores indican las fases de apoyo y oscilación durante el recorrido. Gris oscuro: patas traseras, gris claro: patas delanteras, superiores: lado izquierdo, inferiores: lado derecho.

Figura 4. Diagrama de segmentos del lado izquierdo de la pasada 2 de la rata ejemplo.
Punto amarillo: cadera, punto verde: rodilla, punto azul: tobillo.
CONCLUSIONES
El software KineRAT es una herramienta idónea para la evaluación de la locomoción de ratas de experimentación en estudios de lesión medular.
REFERENCIAS
[1] D. M. Basso, M. S. Beattie, and J. C. Bresnahan, “A Sensitive and Reliable Locomotor Rating Scale for Open Field Testing in Rats,” J. Neurotrauma, 1995, doi: 10.1089/neu.1995.12.1.
[2] A. D. Kloos, L. C. Fisher, M. R. Detloff, D. L. Hassenzahl, and D. M. Basso, “Stepwise motor and all-or-none sensory recovery is associated with nonlinear sparing after incremental spinal cord injury in rats,” Exp. Neurol., 2005, doi: 10.1016/j.expneurol.2004.09.016.
Agradecimientos
Al Dr. Jörg Mey del Grupo de Regeneración Neuronal por ceder los resultados de la rata ejemplo para la confección de esta newsletter.
Al Dr. Jorge Collazos del Grupo de Reparación Neural y Biomateriales por ceder el equipo de adquisición cinemática para el uso común de los diferentes laboratorios.
AUTORES
Enrique Pérez Rizo, M.E., PhD.
Ingeniero de Biomecánica.
Unidad de Ingeniería y Evaluación Motora
Unidad de Investigación – Hospital Nacional de Parapléjicos.
Toledo, España.
Marta Aguado Garrido.
Graduada en Bioquímica
Laboratorio de Regeneración Neuronal
Unidad de Investigación – Hospital Nacional de Parapléjicos.
Toledo, España.
Arturo Fernández Mora.
Estudiante de Ingeniería Electrónica Industrial y Automática.
Grupo Applied Intelligent Systems. Escuela de Ingeniería Industrial y Aeroespacial de Toledo.
Universidad de Castilla la Mancha.
Toledo, España.

Un comentario en “SOFTWARE KineRAT DE ANÁLISIS CINEMÁTICODEMOSTRACIÓN DE UN CASO”