Introducción
La locomoción es una función fundamental en todos los animales. El estado neurológico de los humanos y de los animales de experimentación afecta directamente a la calidad de la locomoción, por lo que esta debe ser analizada en los animales utilizados en los estudios que buscan avances en el conocimiento y tratamiento de la lesión medular. La locomoción en animales cuadrúpedos es un movimiento repetitivo que involucra principalmente a las extremidades y cuyo objetivo es el avance del centro de gravedad. Con técnicas de fotogrametría se pueden medir los ángulos de las principales articulaciones de las extremidades, además de otras variables como la velocidad, la longitud de la zancada o la frecuencia del paso, calculadas a partir del tiempo y de los desplazamientos de los segmentos corporales, denominadas variables espaciotemporales. Dado que se trata de un movimiento repetitivo, la unidad básica de estudio es un ciclo de marcha, definido por el período comprendido entre dos contactos iniciales consecutivos de la pata con el suelo. A su vez, cada ciclo se puede dividir en fase de apoyo, caracterizada por el contacto entre la pata y el suelo, y la oscilación que es la fase aérea durante la cual el animal avanza la pata hasta el siguiente contacto inicial.
La Unidad de Ingeniería y Evaluación Motora (UIEM) ha desarrollado un software para el análisis de la cinemática articular de pequeños animales durante la locomoción, basado en el estudio de los diferentes ciclos que se generan durante el desarrollo de esta función. Este software documenta completamente el patrón cinemático del animal con un solo click de ratón. Esto supone que a partir de ahora disponemos de una herramienta cuantitativa y objetiva capaz de describir completamente el comportamiento de los diferentes grupos de animales que participan en nuestras investigaciones. Con ello lograremos avalar mejor las conclusiones de nuestra investigación, profundizar en el impacto de la lesión neurológica en la función, documentar mejor nuestras publicaciones e incluso reducir el tamaño muestral de nuestros estudios.
En la newsletter anterior de la UIEM se describió el equipo para el registro de la cinemática de pequeños animales que tenemos en el animalario. Vimos cómo se pintan los marcadores, se registran los vídeos, se analizan estos y se exportan los datos. En esta newsletter veremos el software desarrollado para analizar los datos exportados.
Descripción del software
El software desarrollado se llama KineRAT, está desarrollado en Python, versión 3.9.7. Python es un lenguaje de alto nivel de programación, multiplataforma y multiparadigma (orientado a objetos). Cuenta con una licencia de código abierto que permite su utilización en distintos contextos de forma gratuita.
El software está en fase de desarrollo. Los miembros traseros están totalmente implementados.
El software utiliza como interface de usuario la consola del intérprete de programación.
Procedimiento
El software trabaja sobre los datos generados a partir de una sesión de grabación. Durante una sesión se registran varias pasadas de un animal, de cada pasada se toman un vídeo derecho y uno izquierdo que están sincronizados (Figura 1). Los vídeos se analizan con el software Kinovea (visto en la anterior newsletter del 22/11/2021) y se exportan las coordenadas de los marcadores, los ángulos y los instantes de contacto inicial y despegue de la pata (Figura 2).
Una vez abierto el software KineRAT, este nos pregunta sobre la ubicación de la carpeta que contiene los archivos de la sesión, el código, el peso y la edad del animal. A continuación, el programa lee el contenido de la carpeta, procesa los datos y guarda en la misma carpeta una serie de gráficas que describen movimientos articulares realizados durante la sesión y las hojas de datos con los ángulos, las variables espaciotemporales y los estadísticos.
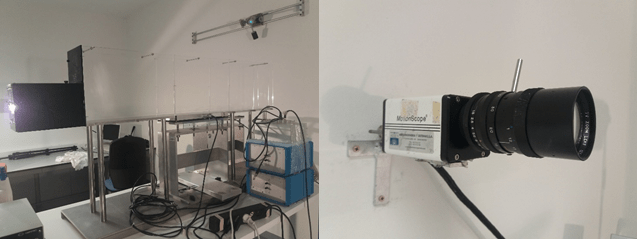
Figura 1. Pasillo de locomoción y cámara rápida

Figura 2. Software Kinovea de análisis cinemático.
La Imagen muestra dos fotogramas de los lados derecho (izquierda) e izquierdo (derecha) durante un recorrido del animal correspondientes al mismo instante de tiempo. Cada fotograma ilustra los ángulos de la cadera (azul), rodilla (rojo) y tobillo (verde), y la longitud (magenta) y duración (blanco) del ciclo.
Variables analizadas y gráficas de representación
A continuación se relacionan las variables que aporta el software y, como ejemplo, se muestran algunos de los datos correspondientes a 3 recorridos de una sesión de grabación de una rata hembra normal, de 215,0 g de peso y 2,2 meses de edad.
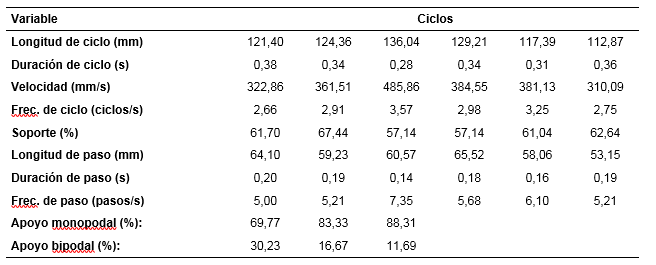
- Variables espaciotemporales (Tabla 1): longitud de ciclo (mm), duración de ciclo (s), velocidad (mm/s), frecuencia de ciclo (ciclos/segundo), soporte (%), longitud de paso (mm), duración de paso (s), frecuencia de paso (pasos/s), apoyo monopodal (%) y apoyo bipodal (%). Los valores se calculan para cada ciclo y se aportan en un archivo CSV (valores separados por comas) que se puede abrir y tratar con otros programas como EXCEL, SPSS, etc.
Tabla 1. Variables espaciotemporales de 6 ciclos analizados del miembro trasero izquierdo.
- Ángulos articulares (grados). Ángulos de cada articulación de las extremidades trasera derecha e izquierda, desarrollados a lo largo de cada recorrido, calculados en cada frame. Se aportan en un archivo CSV en el que cada columna corresponde a las siguientes variables: tiempo (s), flexoextensión de cadera, flexoextensión de rodilla, flexoextensión de tobillo y apertura (ángulo formado por la recta formada entre la cadera y el tobillo con la vertical).

Figura 3. Ángulos articulares de los miembros traseros durante un recorrido del animal.
L: izquierdo, R: derecho. La imagen muestra una porción de lo que muestra la pantalla cuando se abre un archivo de datos con el software EXCEL. Existe un retraso temporal de las variables derechas con respecto a las izquierdas debido a que el miembro izquierdo entró en el campo de visión de la cámara antes de que el derecho.
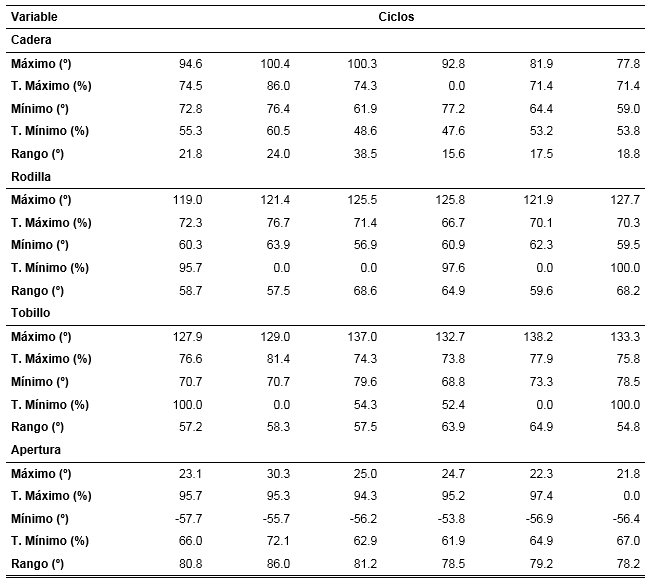
- Estadísticos articulares (Tabla 2): máximo, momento en el cual ocurre el máximo, mínimo, momento en el cual ocurre el mínimo y rango. Los valores se calculan para cada ciclo y se aportan en un archivo CSV.
Tabla 2. Estadísticos articulares de 6 ciclos del miembro trasero izquierdo.
- El software aporta varios gráficos que permiten la visualización de las variables.
- Ángulos de la cadera, rodilla, tobillo y apertura de cada recorrido del lado izquierdo (Figura 5).
- Ángulos de la cadera, rodilla, tobillo y apertura de cada recorrido del lado derecho.
- Ángulos de la cadera derecha y de la cadera izquierda de cada recorrido.
- Ángulos de la rodilla derecha y de la rodilla izquierda de cada recorrido (Figura 5).
- Ángulos del tobillo derecho y del tobillo izquierdo de cada recorrido.
- Ángulos de apertura derecho e izquierdo de cada recorrido.
- Diagramas de segmentos del lado izquierdo de cada recorrido (Figura 6).
- Diagramas de segmentos del lado derecho de cada recorrido.
- Gráficas del patrón flexoextensor de la cadera derecha y de la cadera izquierda.
- Gráficas del patrón flexoextensor de la rodilla derecha y de la rodilla izquierda (Figura 7).
- Gráficas del patrón flexoextensor del tobillo derecho y del tobillo izquierdo.
- Gráficas del patrón de los ángulos de apertura derecho e izquierdo.
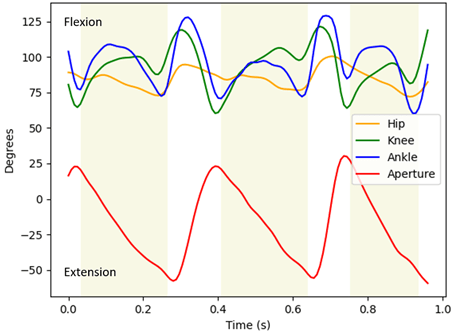
Figura 4. Flexoextensión de las articulaciones del miembro trasero izquierdo. Las franjas verticales sombreadas representan las fases de apoyo de cada ciclo.

Figura 5. Flexoextensión de ambas rodillas.
Franja vertical roja: apoyo miembro derecho. Franja vertical azul: apoyo miembro izquierdo. Las franjas verticales más oscuras son períodos de solapamiento de apoyo derecho e izquierdo, cuando ocurre el apoyo bipodal.

Figura 6. Diagrama de segmentos del lado izquierdo del animal durante un recorrido.
Punto amarillo: cadera, punto verde: rodilla, punto azul: tobillo.
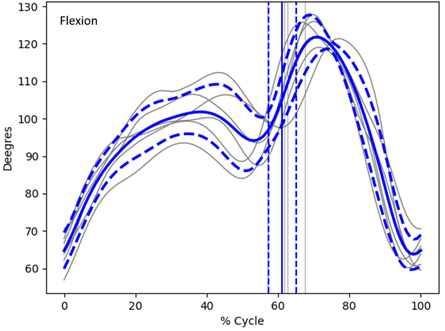
Figura 7. Patrón de flexoextensión de la rodilla izquierda.
Gris: ciclo normalizado 0 % al 100%, azul: media (continua) +/- DE (discontinua), línea vertical: despegue de la pata.
Conclusiones
La UdI dispone de un software, desarrollado en lenguaje de código abierto y, por lo tanto, gratuito, capaz de determinar el patrón de cinemática de pequeños animales.
El software se puede escalar a los miembros delanteros, a nuevas variables, a otras especies animales (humanos incluidos), a otros tipos y modelos de equipos de adquisición cinemática, etc.
Con los datos obtenidos y dentro del mismo entorno se podrían realizar otros análisis más avanzados como reconocimiento de patrones, análisis multivariable, etc.
Este software aspira a ser una plataforma que nutra de conocimiento a los grupos de investigación. Incluso un espacio donde los grupos puedan realizar sus propias investigaciones.
Os animamos a utilizar la valoración cinemática en vuestros estudios. Sin duda, una herramienta que será el gold standar de la valoración funcional.
Agradecimientos
Al Dr. Ernesto Doncel y la Dra. Vinnitsa Buzoianu del Grupo de Química Neuro-regenerativa por sus contribuciones en la puesta a punto del software.
AUTORES
Enrique Pérez Rizo, M.E., PhD.
Ingeniero de Biomecánica.
Hospital Nacional de Parapléjicos.
Toledo, España.
Andrés Pérez Valmaña.
Estudiante de Ingeniería Electrónica Industrial y Automática.
Escuela de Ingeniería Industrial y Aeroespacial de Toledo.
Universidad de Castilla la Mancha.
Toledo, España.

Un comentario en “SOFTWARE PARA ANÁLISIS CINEMÁTICO DE PEQUEÑOS ANIMALES: KineRAT”